Time
The time reference system in the SRAL/MWR Level-2 products is the Universal Time Coordinated (UTC). The UTC system is piecewise uniform and continuous, i.e. the time difference between UTC and TAI is equal to an integer number of seconds and is constant except for occasional jumps from inserted integer leap seconds. The leap seconds are inserted to cause UTC to follow the rotation of the Earth, which is expressed by means of the non-uniform time reference Universal Time UT1.
On-board, the time reference system is the Global Positioning System (GPS). GPS time is an atomic clock time similar to, but not identical to, UTC time. It is synchronised to UTC but the main difference is that GPS time does not introduce leap seconds. The introduction of UTC leap seconds causes GPS time and UTC time to differ by a known integer number of cumulative leap seconds, i.e. the leap seconds that have been accumulated since GPS epoch at midnight on January 5th 1980.
The conversion from GPS time to UTC time is implemented in the Level-1 processing chain.
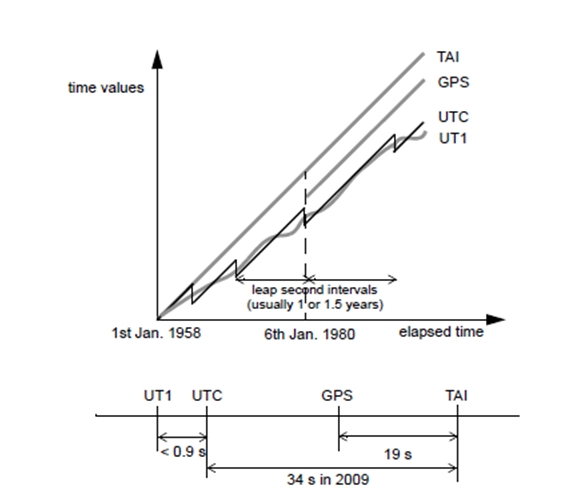
Figure 1: Relationship Between Time Reference Systems (Credit: DEIMOS)
The time format of SRAL/MWR products is Modified Julian Day 2000 (MJD2000): interval of time in days and fractions of days since January 1st 2000 at 00:00:00.
The time resolution is one microsecond.
Position Reference Frames
Earth fixed: the reference frame used for input and output of the satellite state vector (i.e. orbit definition), and for the output for geolocation. The Earth fixed reference frame in use is the IERS Terrestrial Reference Frame (ITRF).
Satellite Orbital: a reference frame centred on the satellite and is defined by the Xs, Ys and Zs axes, which are specified relative to the inertial reference frame, namely the True of Date (TOD).The Zs axis points along the radial satellite direction vector, positive from the centre of the TOD reference frame towards the satellite. The Ys axis points along the transversal direction vector within the osculating orbital plane (i.e. the plane defined by the position and velocity vectors of the satellite), orthogonal to the Zs axis and opposed to the direction of the orbital motion of the satellite. The Xs axis points towards the out-of-plane direction vector completing the right hand reference frame.
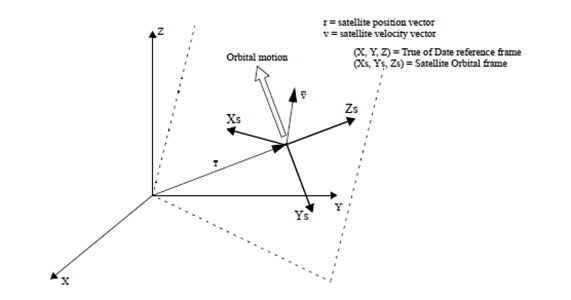
Figure 2: Satellite Orbital Frame (Credit: DEIMOS)
Reference ellipsoid: the geometry of the Earth is modelled by a reference ellipsoid. The reference ellipsoid model in the Sentinel-3 mission is WGS84. The geodetic coordinates (longitude, latitude and altitude) of each point measurement are referenced to WGS84 reference ellipsoid.